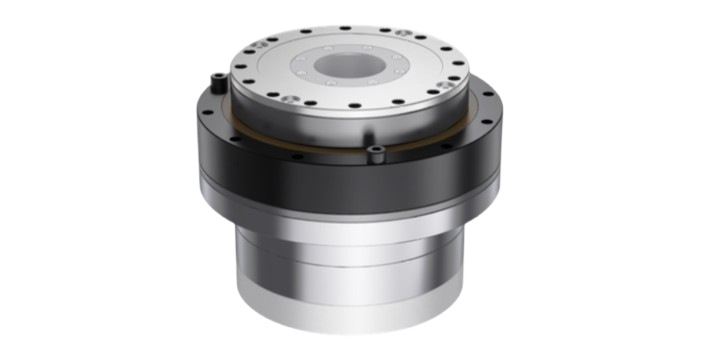
Solid Shaft Rotary Actuator
High integration of integrated joints,Brushless torque motor with strong torque,Stable functionality and high reliability
Lightweight joints are suitable for the work robot market, industrial automation market, and home service robot market
Robot Elbow Joint Actuator
| Applications: | Humanoid robot, Quadruped robot, Exoskeleton robot, Rehabilitation robot, Wheeled robot, bipedal Robot, Robotic arm, others |
| Reducer ratio: | 51 | 81 | 101 | 121 | 161 |
| Nominal Voltage (V): | 24~48 |
| Nominal Current (A): | 2 | 6.1 | 9 |
| Nominal Power (W): | 90 | 150 | 300 | 500 | 750 |
| Nominal Speed (Rpm): | 16 | 17 | 20 | 23 | 24 | 25 | 30 | 31 | 35 | 37 | 38 | 40 | 46 | 54 | 61 | 74 | 75 | 80 |
| Nominal Torque (Nm): | 2.3 | 3.3 | 5.5 | 8.9 | 8.6 | 13.5 | 32 | 33 | 49 | 42 | 58 | 61 | 68.5 | 107 | 120 | 185 | 267 | 255 | 586 |
| Peak Current (A): | 3 | 5 | 6.7 | 8.4 | 10.4 | |
| Peak Torque (Nm): | 4.5 | 7.5 | 7 | 11 | 25 | 27 | 29 | 41 | 43 | 55 | 90 | 105 |
| Backlash (arcsec): | 60 | 40 | 30 | 20 | 10 |
| Communication protocol: | CAN |
| Double Encoder: | Yes |
These products could also be interesting for you
Hollow Shaft Rotary Actuator
-
Rated Voltage:
-
24~48 V
-
Peak Torque:
-
3.3~841
Nm
-
Motor Size:
-
55x40~145x170
mm
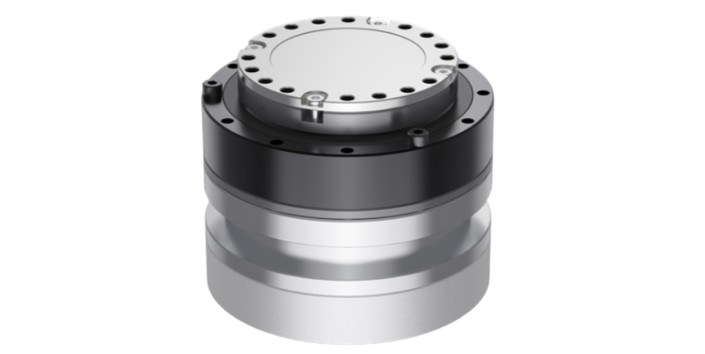
Solid Shaft Rotary Actuator
-
Rated Voltage:
-
24-48 V
-
Peak Torque:
-
6~171
Nm
-
Motor Size:
-
76.1x52~102.4x110
mm
Harmonic Drive Actuator series

-
Rated Voltage:
-
24~36 V
-
Peak Torque:
-
2.2~220
Nm
-
Motor Size:
-
47.8x40~98.5x90
mm
